
一、概述
新能源汽车在智能化进程中,线控转向系统(Steering By Wire,SBW)的应用在其中扮演着重要角色,它彻底改变了传统汽车的机械转向方式,通过摒弃机械连杆结构,实现了从方向盘到车轮转向执行机构间的信号传输和控制完全依靠电子信号来完成。该技术是汽车电气化和智能化的重要组成部分,尤其对自动驾驶汽车来说,更是不可或缺的关键技术。
二、原理与架构
在SBW系统中,其主要涉及的节点按功能可分为感知层、控制层和执行层三部分。其中感知层主要包括方向盘转角传感器、扭矩传感器、车速传感器、加速度传感器以及角速度传感器等。各传感器为SBW提供的数据功能如下:
1)方向盘转角传感器:用于监测方向盘的转动角度和转速,以反映驾驶员的转向意图;
2)扭矩传感器:测量驾驶员施加在方向盘上的力矩,用于模拟路感反馈;
3)车速传感器:提供车辆当前的速度信息,用于计算合适的转向助力和动态响应;
4)加速度传感器和角速度传感器:提供车辆动态信息,如侧向加速度、横摆角速度等,帮助控制系统理解车辆状态;
5)其他:提供车辆状态、道路等信息。
SBW的控制层即控制单元,它负责接收所有传感器的数据,并将其进行预处理和融合,以确保数据的准确性和完整性,基于数据结果,根据车辆状态、驾驶员输入和其他系统信息,计算出最优的转向角度和速度指令,并在系统运行过程中处理故障诊断与执行冗余控制策略。
SBW的执行层可将其分为转向执行总成与路感模拟装置两部分,其中转向执行总成由转向电机、减速机构与转向传动装置构成,其主要工作过程是通过转向电机接收控制单元发出的指令,并执行相应的电机扭矩输出,减速机构和转向传动装置将电机的旋转运动转化为前轮的转向动作,从而实现车辆的转向操作。
路感模拟装置是在方向盘处安装的力反馈机构,它根据控制单元的指令提供真实路感的模拟,以确保驾驶员能够感知到转向阻力和路面反馈。
基于上述基本原理,整理SBW的架构示意如下:
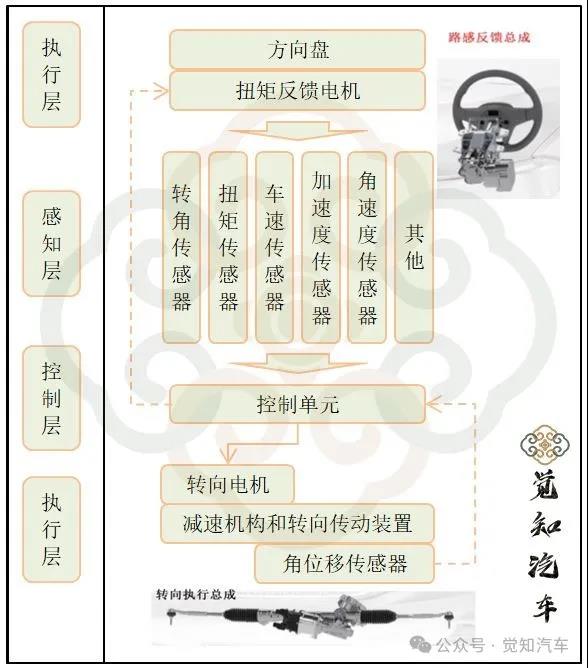
图1 SBW架构示意
三、系统工作流程
SBW功能实现的主要过程可分为数据采集与输入、系统控制、系统执行以及反馈模拟四个阶段。当驾驶员转动方向盘时,内置的角度传感器和扭矩传感器会实时捕捉到方向盘的动作幅度、旋转速度以及作用在其上的力度,并将这些物理量转换成电信号。同时车身各处的状态传感器将会实时为系统提供车辆位置、速度、运动姿态和道路等信息。
控制单元在接收到上述传感器的实时数据后,会结合车辆的行驶状态、道路条件、驾驶员行为习惯以及可能激活的主动安全功能进行综合分析。为使后续的计算过程准确无误,在收到原始数据后,控制单元会对其进行预处理,即对这些数据进行滤波、平滑处理等处理,以消除不必要的干扰,确保数据的质量和准确性。
对处理后的数据进行融合时,会再提取各个传感器的互补信息,以进一步减少不确定性和错误影响。如,如果同时使用了多个角度传感器,我们可能会采用卡尔曼滤波、贝叶斯估计等方法,结合它们的测量结果,估算出最可信的转向角度。对于状态信息的融合,会结合车辆动力学模型,将不同来源的信息综合起来,如将驾驶员的转向意愿与车辆实际行驶状态(车身姿态、速度、轮胎抓地力等)结合起来,以确定最佳转向响应。同时,过程中还需要对每一条数据进行有效性检查,如有异常或超出合理范围的数据,将进行剔除或采用备用数据源。
根据融合后的数据结果,控制单元会根据预定控制逻辑和实时工况、状态进行决策,如在自动驾驶模式下,依据路线规划、障碍物检测结果等因素,决定是否需要调整转向指令。
根据以上分析结果,控制单元将计算出理想的转向角度、转向速率或转向力矩,并生成相应的控制指令,再通过通信接口传递给系统的执行机构。在系统运行过程中,控制单元会不断监控执行机构的响应情况,并通过反馈机制对控制指令进行实时调整,确保系统达到预期的控制效果,同时也为驾驶员提供仿真或增强的真实驾驶感受反馈。
对此数据处理及控制过程的流程进行示意,如下:
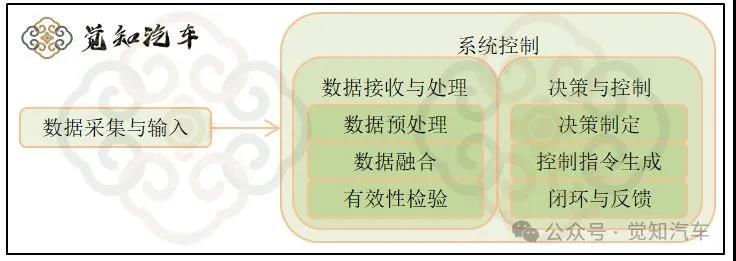
图2 SBW数据处理与控制示意
在决策与控制阶段,为了确保计算出的转向角、转向速率等参数与实际需求相符,通常系统会执行多项关键步骤:首先基于车辆相关模型,预测车辆对于不同转向指令的响应,确保计算出的控制参数能引导车辆按照预期轨迹行驶,同时使用相关控制策略,根据系统当前状态和目标状态,快速、准确地计算出控制量,使车辆在各种工况下都能保持良好的稳定性及跟踪性能。
在系统运行过程中,考虑到传感器数据可能存在误差,会采用数据融合技术和传感器误差补偿算法来提高测量精度,从而使得基于这些数据计算出的控制指令更为可靠。并通过闭环控制系统,实时监测实际车辆状态与期望状态之间的偏差,根据偏差信息不断调整控制指令,形成一个迭代优化的过程,直至达到或者接近预设的目标状态。
对此提高计算结果的过程示意如下:
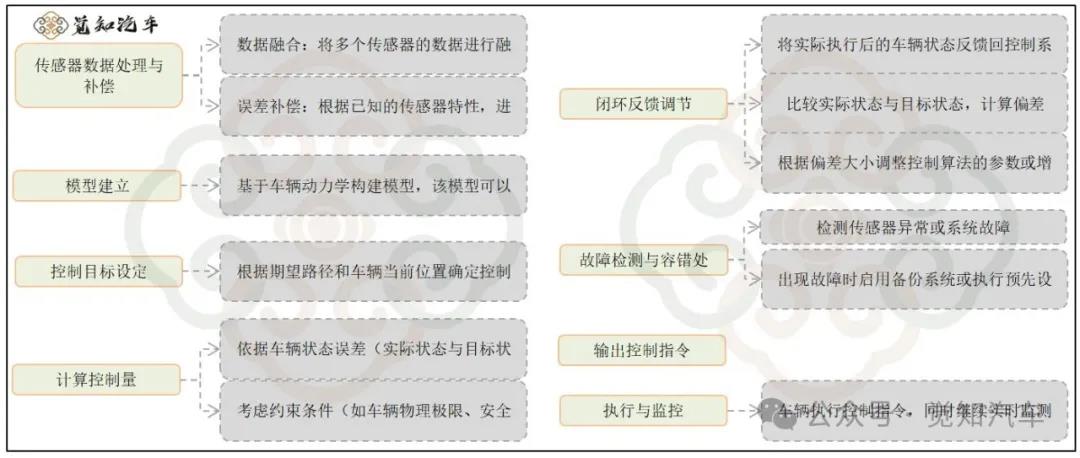
图3 SBW决策与控制计算过程示意
最后控制单元将计算出的转向指令转化为驱动信号,再传输给位于转向系统的电动机,电动机在接受到信号后,将产生相应的驱动力,通过齿轮或其他传动机构改变前轮的实际转向角度,从而实现车辆的转向控制。
转自觉知汽车
